ABBモーターQABP71M2A
ABBモーターQABP71M2B
ABBモーターQABP80M2A
ABBモーターQABP80M2B
ABBモーターQABP315L4A
ABBモーターQABP315L4B
ABBモーターQABP355M4A
ABBモーターQABP355L4A
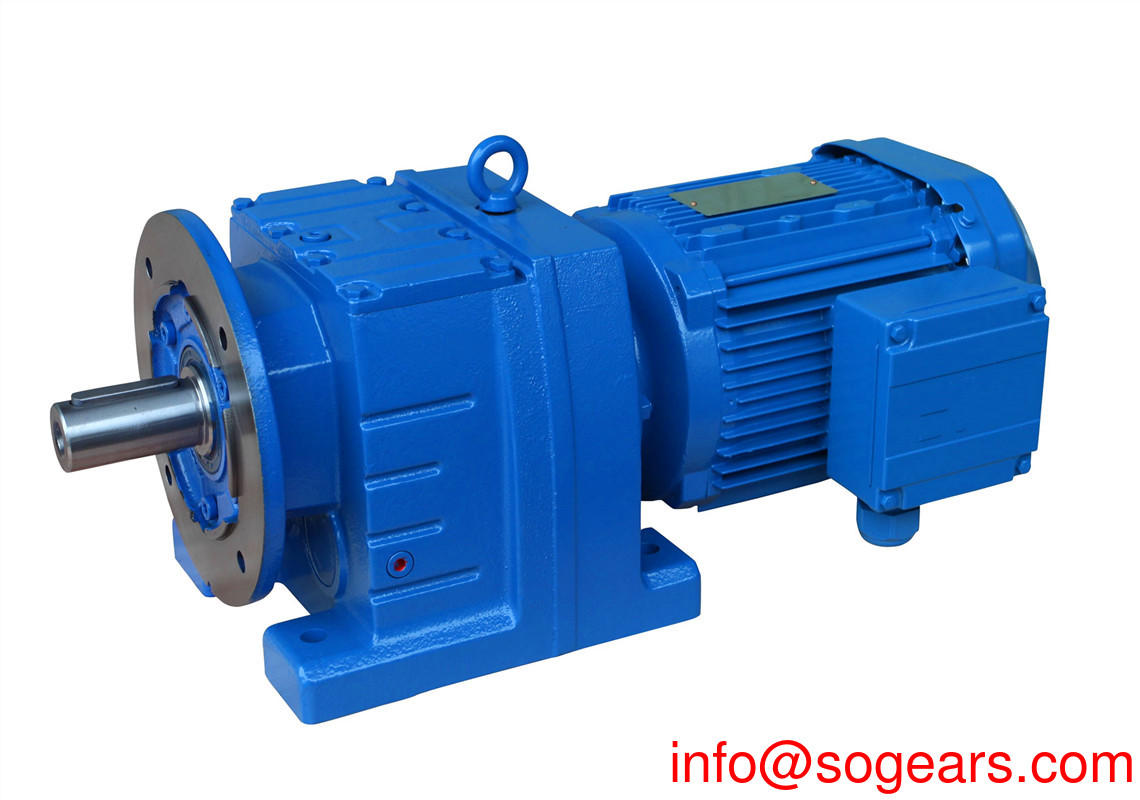
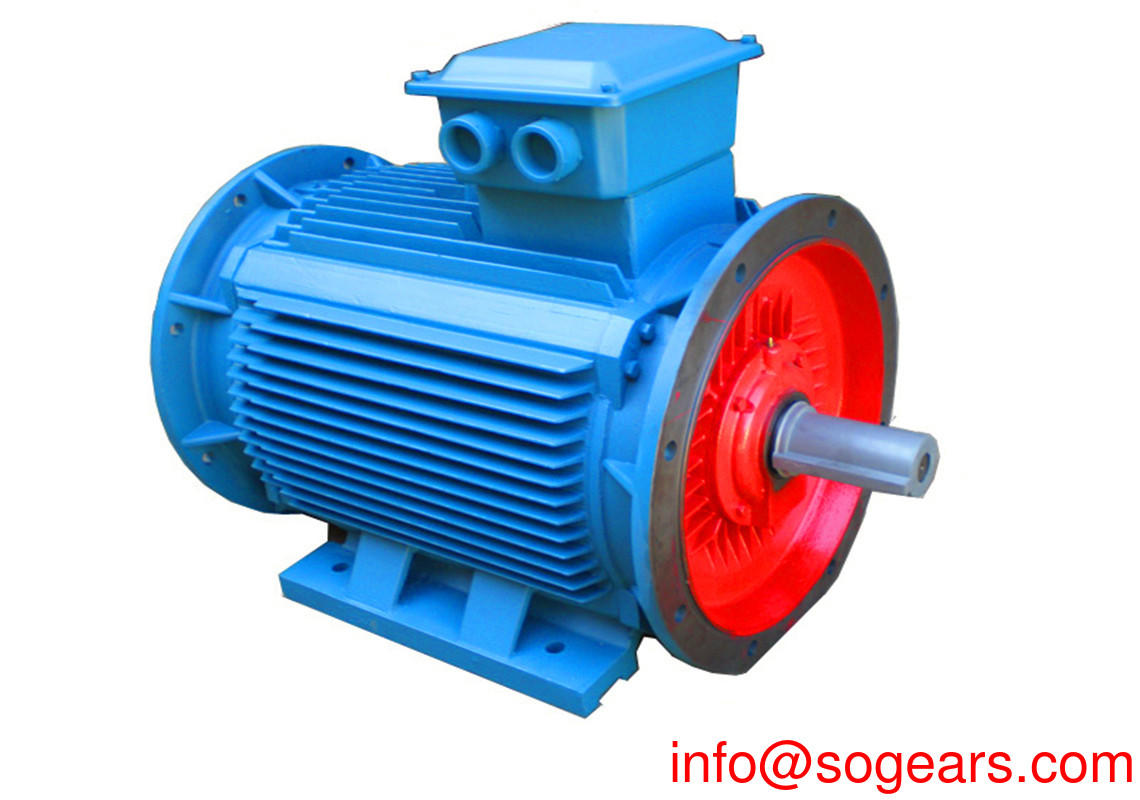
QABPシリーズ:可変周波数駆動モーターの設計は合理的であり、国内外の同様の周波数コンバーターと一致させることができます。 非常に互換性があり、多用途です。 エネルギー効率レベルはEFF2 / IE3です
QABPシリーズ可変周波数速度調整モーターは、ドイツや日本などの先進国の製品の利点を吸収し、コンピューター支援設計技術を設計に適用します。 国内および国外の同じタイプの周波数変換デバイスと一致させることができ、強力な互換性と汎用性を備えています。 モーターは、動作が信頼でき、保守が容易なかご型構造を採用しています。 モーターには軸流ファンが個別に装備されており、モーターがさまざまな速度で良好な冷却効果を発揮できるようにします。 モーターの絶縁は、国際的に広く使用されているFクラスの絶縁構造を採用しており、モーターの信頼性が向上しています。 モーター出力、フット取り付けサイズ、およびセンター高さの対応するインジケーターは、QAシリーズ非同期モーターと完全に一致しています。 このモーターシリーズは、軽工業、繊維、化学工業、冶金、工作機械など、速度調整回転デバイスを必要とする産業で広く使用でき、速度調整の理想的な動力源です。
この一連のモーターの出力は0.25 kWから200 kWで、フレームの中心の高さは71 mmから315 mmです。
周波数変換モーターとは、標準的な環境条件下で定格速度100%〜10%の範囲で定格負荷100%で連続的に動作するモーターを指し、温度上昇はモーターの定格許容値を超えません。
パワーエレクトロニクス技術と新しい半導体デバイスの急速な発展により、AC速度調整技術は継続的に改善および改善され、徐々に改善されたインバーターは、良好な出力波形と優れたコストパフォーマンスを備えたACモーターで広く使用されています。 例:製鉄所で使用される大規模モーターと中型および小型ローラーモーター、鉄道および都市鉄道輸送用の牽引モーター、エレベーターモーター、コンテナー昇降装置用クレーンモーター、ポンプおよびファン用モーター、コンプレッサー、家電AC可変周波数速度調整モーターを使用し、良好な結果を達成しました[1]。 AC可変周波数速度調整モーターを採用すると、DC速度調整モーターに比べて大きな利点があります。
(1)簡単な速度調整と省エネ。
(2)ACモーターは、構造がシンプルで、サイズが小さく、慣性が小さく、低コストで、メンテナンスが容易で、耐久性があります。
(3)容量を拡張して、高速および高電圧動作を実現できます。
(4)ソフトスタートと高速ブレーキを実現できます。
(5)火花なし、防爆性、強力な環境適応性。 [1]
近年、国際的なアップコンバージョン速度調整トランスミッションは、13%から16%の年間成長率で開発されており、ほとんどのDC速度調整トランスミッションに徐々に取って代わりました。 固定周波数および定電圧電源で動作する通常の非同期モーターは、可変周波数速度調整システムで使用されるため、大きな制限があります。 用途と要件に応じて設計された特別なインバーターACモーターが海外で開発されました。 たとえば、低ノイズ、低振動モーター、低速トルク特性が改善されたモーター、高速モーター、タコジェネレーター付きモーター、ベクトル制御モーターがあります[1]。
構成原理
非同期モーターのスリップ率がほとんど変化しない場合、速度は周波数に比例します。 電源周波数を変更すると、非同期モーターの速度が変わることがわかります。 周波数変換速度の調整では、主磁束が変化しないことが常に望まれます。 通常の動作中に主磁束が磁束よりも大きい場合、磁気回路は過飽和状態になり、励起電流が増加し、力率が低下します。 通常の動作中に主磁束が磁束よりも小さい場合、モーターのトルクは減少します[1]。
開発プロセス編集
現在のモーター周波数変換システムは、ほとんどが一定のV / F制御システムです。 この周波数変換制御システムの特徴は、シンプルな構造と安価な製造です。 このシステムは、ファンなどの広い場所で広く使用されており、周波数変換システムの動的性能要件はそれほど高くありません。 このシステムは、典型的な開ループ制御システムです。 このシステムは、ほとんどのモーターのスムーズな伝達要件を満たすことができますが、動的および静的調整性能が制限されており、動的および静的性能に関する厳しい要件があるアプリケーションでは使用できません。 地元。 動的および静的レギュレーションの高性能を達成するために、閉ループ制御システムのみを使用してそれを達成できます。 そのため、一部の研究者は、閉ループスリップ周波数を制御するモーター速度制御方法を提案しています。 この速度制御方法は、静的動的速度制御で高性能を実現できますが、このシステムは低速のモーターでのみ取得できます。 アプリケーションは、モーターの速度が高い場合、このシステムが電力を節約する目的を達成するだけでなく、モーターに大きな過渡電流を生成させ、モーターのトルクを瞬時に変化させることです。 したがって、より高い速度でより高い動的および静的性能を実現するには、モーターによって生成される過渡電流の問題を最初に解決する必要があります。 この問題を適切に解決することによってのみ、モーター周波数変換の省エネ制御技術を開発することができます。 [2]
主な機能編集
特殊な周波数変換モーターには、次の特性があります。
クラスB温度上昇設計、クラスF断熱材製造。 高分子絶縁材料と真空圧力ディップペイントの製造プロセスと特別な絶縁構造を採用して、モーターの高速動作と高周波電流への耐性に十分な、より高い絶縁耐電圧とより高い機械的強度を持つ電気巻線を作成しますインバータの衝撃と電圧。 断熱材の損傷。
バランスの質は高く、振動レベルはRレベル(低減された振動レベル)です。 機械部品には高い加工精度があり、高速で動作できる特殊な高精度ベアリングが使用されています。
強制換気冷却システム、すべて輸入輸入軸流ファン超静音、長寿命、強風を使用。 モーターがあらゆる速度で効果的な放熱を行い、高速または低速の長期動作を実現できることを確認してください。
従来のインバーターモーターと比較して、AMCADソフトウェアによって設計されたYPシリーズモーターは、より広い速度範囲とより高い設計品質を備えています。 特別な磁場設計により、高高調波磁場がさらに抑制され、広い周波数、省エネ、低ノイズ設計指標の要件が満たされます。 広範囲の一定トルクおよび出力速度調整特性により、速度は安定しており、トルクリップルはありません。
さまざまなタイプのインバーターと良好なパラメーターマッチングがあり、ベクトル制御により、ゼロ速度のフルトルク、低周波数の大トルク、高精度の速度制御、位置制御、高速動的応答制御を実現できます。 YPシリーズ周波数変換専用モーターには、ブレーキとエンコーダーを装備して、正確な停止を実現し、閉ループ速度制御による高精度の速度制御を実現できます。
「減速機+周波数変換専用モーター+エンコーダー+インバーター」を採用して、超低速無段階速度の精密制御を実現します。 YPシリーズインバーター専用モーターは汎用性が高く、取り付け寸法はIEC規格に準拠しており、一般的な標準モーターと互換性があります。
モーター絶縁損傷編集
AC可変周波数モーターの販売促進および適用中に、AC可変周波数モーターの絶縁に多数の初期の損傷がありました。 多くのAC可変周波数モーターの耐用年数は1〜2年で、数週間しか使用できないものもあります。 試運転中であっても、モーターの絶縁は損傷を受けており、通常はターン間に発生します。 これはモーター絶縁技術に新しい問題をもたらします。 過去数十年間に開発された電源周波数正弦波電圧下でのモーター絶縁設計の理論は、AC可変周波数速度調整モーターに適用できないことが実践により証明されています。 インバーターモーター絶縁の損傷メカニズムを研究し、ACインバーターモーター絶縁設計の基本理論を確立し、ACインバーターモーターの工業規格を策定する必要があります。
1電磁ワイヤの損傷
1.1部分放電と空間電荷
現在、可変周波数速度調整ACモーターは、IGB T(絶縁ゲートダイオード)テクノロジーPWM(パルス幅変調nパルス幅変調)インバーターによって制御されています。 その出力範囲は約0.75〜500kWです。 IGBTテクノロジーは、非常に短い立ち上がり時間で電流を供給できます。 立ち上がり時間は20〜100μsであり、生成された電気パルスのスイッチング周波数は非常に高く、20kHzに達します。 モーターとケーブルの間のインピーダンス不整合により、インバーターからモーター端への電圧が急速に上昇すると、反射電圧波が生成されます。 この反射波は周波数変換器に戻り、ケーブルと周波数変換器の間のインピーダンス不整合により元の電圧波に追加される別の反射波を誘発し、それにより電圧波の前縁でスパイク電圧を生成します。 スパイク電圧の大きさは、パルス電圧の立ち上がり時間とケーブルの長さに依存します[1]。
一般的に、ワイヤの長さが長くなると、ワイヤの両端で過電圧が発生します。モータ側の過電圧の振幅は、ケーブルの長さとともに増加し、飽和する傾向があります。 。 このテストでは、電圧の立ち上がりエッジと立ち下がりエッジで過電圧が発生し、減衰振動が発生することが示されています。 減衰は指数法則に従い、振動周期はケーブルの長さとともに増加します。 PWM駆動パルス波形には380種類の周波数があります。 480つはスイッチング周波数です。 スパイク電圧の繰り返し周波数は、スイッチング周波数に正比例します。 もう1.2つは基本周波数で、モーターの速度を直接制御します。 各基本周波数の開始時に、パルスの極性は正から負または負から正に変わります。 この時点で、モーターの絶縁には、ピーク電圧値の1.5倍のフルスケール電圧がかかります。 さらに、巻線が埋め込まれた576相モーターでは、異なる位相の隣接する600ターン間の電圧極性が異なり、フルスケール電圧ジャンプがピーク電圧値の1.6倍に達する場合があります。 テストによると、1.8 / 0.1V ACシステムのPWMインバーターによって出力される電圧波形は、モーター側で80〜1kVの測定ピーク電圧値を持ち、XNUMX / XNUMXV ACシステムでは、測定電圧波形がピーク電圧値はXNUMX〜XNUMX kVに達します。 このフルスケール電圧では、巻線のターン間で表面部分放電が発生することは非常に明白です。 イオン化により、空隙に空間電荷が生成され、印加電界と反対の誘導電界が形成されます。 電圧の極性が変化すると、この逆電界は印加電界と同じ方向になります。 このようにして、より高い電界が生成され、部分放電の数が増加し、最終的に破壊を引き起こします。 テストでは、これらのターンツーターン絶縁に作用する電気ショックの大きさは、導体の特定の特性とPWM駆動電流の立ち上がり時間に依存することが示されています。 立ち上がり時間がXNUMXμs未満の場合、電位のXNUMX%が巻線の最初のXNUMXターンに追加されます。つまり、立ち上がり時間が短いほど、電気ショックが大きくなり、インターの寿命が短くなります。 -ターン断熱[XNUMX]。
1.2誘電損失加熱
Eが絶縁体の臨界値を超えると、誘電損失が急激に増加します。 周波数が増加すると、それに応じて部分放電が増加し、その結果、熱が発生し、漏れ電流が大きくなり、Niがより速く上昇します。つまり、モーターの温度上昇が上昇します。そして断熱材はより速く老化します 要するに、可変周波数モーターでは、正確には、上記の部分放電、誘電加熱、空間電荷誘導、および電磁ワイヤの早期損傷を引き起こす他の要因の複合効果によるものです[1]。
2主絶縁、相絶縁、絶縁塗料の損傷
前述のように、PWM可変周波数電源を使用すると、可変周波数モーターの端子での振動電圧の振幅が増加します。 したがって、モーターの主絶縁、相絶縁、絶縁塗料は、より高い電界強度に耐えます。 テストによると、電圧上昇時間、ケーブル長、インバーターの出力端子のスイッチング周波数などの要因の複合効果により、上記端子のピーク電圧は3kVを超えることがあります。 さらに、モーター巻線のターン間で部分放電が発生すると、絶縁の分布容量に蓄積された電気エネルギーが熱、放射、機械的および化学的エネルギーになり、絶縁システム全体が劣化し、絶縁破壊電圧が低下します最終的に断熱システムの故障につながりました[1]。
3繰り返し交番応力による断熱材の加速劣化
PWM周波数変換電源を採用しているため、周波数変換モーターは非常に低い周波数、低電圧、突入電流で起動でき、周波数変換器が提供するさまざまな方法を使用して急速な制動を実行できます。 可変周波数モーターは頻繁な始動と制動を実現できるため、モーターの絶縁は頻繁に周期的な交番応力の影響下にあり、モーターの絶縁は古くなるまで加速されます[1]。
通常の非同期モーターの電磁励起力と機械的伝達に起因する振動の問題は、可変周波数モーターではより複雑になります。 可変周波数電源に含まれるさまざまな時間高調波は、電磁部品に固有の空間高調波と干渉して、さまざまな電磁励起力を形成します。 同時に、モーターの動作周波数範囲が広く、速度変化が大きいため、機械部品の固有振動数と一致すると共振が発生します。 電磁加振力と機械的振動の影響下で、モーター絶縁はより頻繁な周期的交番応力を受け、モーター絶縁の経年劣化を加速します。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}